Completamos la serie sobre el servicio 0x01 de OBD2 en el toyobaru viendo los PIDs relativos al comportamiento del acelerador. El toyobaru monta un acelerador fabricado por DENSO

En particular el identificado por el numero de serie 36010-CA070.
Durante varias semanas he tratado de encontrar información en internet del mismo, sus especificaciones, su hoja de datos, algo que me ayudara a comprender mejor el funcionamiento del mismo.
Me hubiera gustado confirmar algunos datos sobre su funcionamiento:
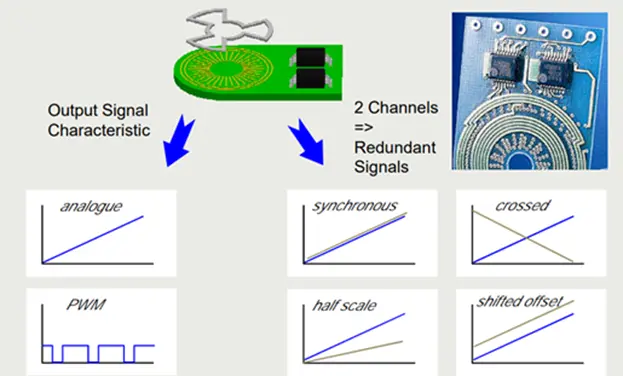
- que tecnología usa para medir el ángulo que se desplaza el pedal (normalmente esto se hace bien con potenciómetros, con sensores inductivos, con sensores magnéticos, ...)
- que tipo de salida ofrece (analógica, modulación por ancho de pulso -PWM-, ... )
- cuantas salidas redundadas ofrece y de que tipo son (sincronas, cruzadas, desplazadas, diferentes escalas, ...)
- que tensiones utiliza para indicar que el acelerador no está pisado o está pisado a fondo. Normalmente, si la tensión de alimentación del sensor es -por ejemplo- 5 V., el sensor va usar una tensión de pocos voltios (digamos 1 V.) para indicar que el acelerador no está pisado y menos de 5 V (digamos 4 V.) para indicar que el acelerador está pisado a fondo. Esto se hace por que si hay algún cortocircuito, la tensión entregada se va a ir a 0 V. (si el cortocircuito es con masa) o a 5 V. (si el cortocircuito es con la alimentación). En ese caso, la ECU detecta una situación anómala y descarta la información de ese sensor (por eso normalmente un pedal de acelerador tiene dos o más sensores).
pues podrían ayudar a comprender mejor los datos que se ofrecen en OBD2. Pero ni búsqueda ha sido infructuosa. No he encontrado nada.
Para tratar de entender mejor los datos, he realizado una prueba. He partido del acelerador de su posición original, he presionado progresivamente hasta llegar al tope del acelerador, he mantenido a fondo unos segundos y he ido retirando la presión de forma progresiva hasta llevar al acelerador a su posición original.
A continuación he representado los datos obtenidos durante la prueba de los PIDs relacionados con el acelerador. También he incluido el byte D5 de la trama CAN 0x140. Y he obtenido el siguiente gráfico:
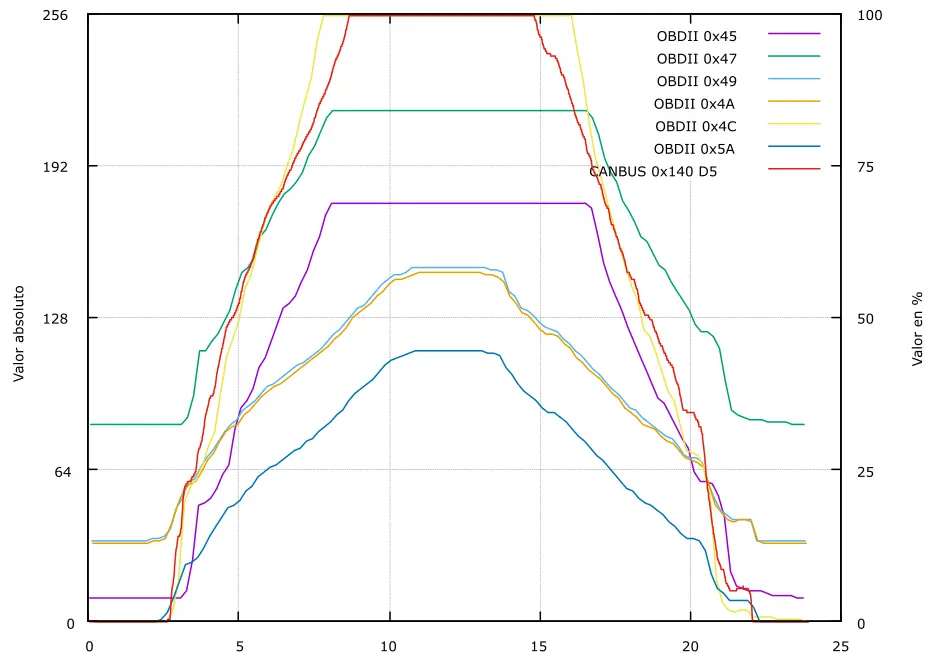
donde se ve que el PID 0x4C (y el byte D5 de la trama CAN 0x140) son los que más se aproximan al resultado esperado conforme a la prueba realizada.
Veamos ahora que dice la norma sobre estos valores.
37) 0x45 Posición relativa del acelerador
La solicitud del PID 0x45 devuelve un byte de información
>> 7DF: 02 01 45 00 00 00 00 00
<< 7E8: 03 41 45 48 00 00 00 00
con el que se representa la posición relativa del acelerador en una escala de 0 al 100%. Es decir, hay que multiplicar el byte recibido por 100 y dividirlo por 255 para obtener el valor, que en la prueba realizada fue de 28.24 %
Según la norma, debe mostrar un valor de 0 % en la posición del acelerador sin pisar "aprendida". Por ejemplo, si se utiliza un sensor de 0 a 5,0 voltios (utiliza un voltaje de referencia de 5,0 voltios), y la posición del acelerador sin pisar es de 1,0 voltios, el TP deberá mostrar (1,0 - 1,0 / 5,0) = 0 % cuando el acelerador esté sin pisar y 30 % en 2,5 voltios. Además, debido al desplazamiento del acelerador sin pisar, el acelerador pisado a fondo normalmente indicará un valor sustancialmente inferior a100 %.
Vemos que esto último se cumple, y que el valor máximo que adopta este PID es de un 70% cuando el acelerador está pulsado al máximo (lo que la norma llama acelerador abierto). Sin embargo, vemos que nunca llega al 0% y que con el acelerador sin pisar el PID adopta un valor entorno al 3%. No se muy bien a que se debe.
38) 0x47 Posición absoluta del acelerador B
La solicitud del PID 0x47 también devuelve un único byte de información
>> 7DF: 02 01 47 00 00 00 00 00
<< 7E8: 03 41 47 85 00 00 00 00
con el que se representa la posición absoluta del acelerador B, en una escala de 0 al 100%. Es decir, hay que multiplicar el byte recibido por 100 y dividirlo por 255 para obtener el valor, que en la prueba realizada fue de 52.16 %
Según la norma, si por ejemplo, se utiliza un sensor de 0 a 5,0 voltios (utiliza un voltaje de referencia de 5,0 voltios), y la posición cerrada del acelerador es de 1,0 voltios, este PID mostrará (1,0 / 5,0) = 20 % a acelerador sin pisar y el 50 % a 2,5 voltios.
Así, la posición del acelerador cuando no está pisado suele ser mayor del 0 %, y la posición del acelerador pisado a fondo suele indicar menos del 100 %, como se puede apreciar en el gráfico.
Según la norma, un pedal acelerador puede tener hasta tres sensores de posición, y se usará este PID para informar del sensor primario.
39) 0x49 Posición del pedal acelerador D
La solicitud del PID 0x49 devuelve un byte de información
>> 7DF: 02 01 49 00 00 00 00 00
<< 7E8: 03 41 49 22 00 00 00 00
con el que se representa la posición del pedal acelerador D, en una escala de 0 al 100%. Es decir, hay que multiplicar el byte recibido por 100 y dividirlo por 255 para obtener el valor, que en la prueba realizada fue de 13.33 %
Las reglas que aplican a este PID son idénticas a las que aplican al PDI 0x47.
40) 0x4A Posición del pedal acelerador E
La solicitud del PID 0x4A también devuelve un byte de información
>> 7DF: 02 01 4A 00 00 00 00 00
<< 7E8: 03 41 4A 21 00 00 00 00
con el que se representa la posición del pedal acelerador D, en una escala de 0 al 100%. Es decir, hay que multiplicar el byte recibido por 100 y dividirlo por 255 para obtener el valor, que en la prueba realizada fue de 12.94 %
Las reglas que aplican a este PID son idénticas a las que aplican a los PDIs 0x47 y 0x4A.
41) 0x4C Control del acelerador
La solicitud 0x4C devuelve un único byte de información
>> 7DF: 02 01 4C 00 00 00 00 00
<< 7E8: 03 41 4C 00 00 00 00 00
con el que se representa la posición del acelerador, en una escala de 0 al 100%, tal y como nosotros la entendemos, es decir: la posición del acelerador sin pisar se mostrará como un 0 %, y la posición del acelerador pìsado a fondo se mostrará como un 100 %. Las posiciones intermedias se mostrarán como un porcentaje de la posición en la que mantengamos el acelerador.
Como se puede observar en la gráfica, sigue el comportamiento esperado a la prueba realizada y es muy similar al valor mostrado en el byte D5 de la trama 0x140 del CAN bus.
Finalmente, para obtener el valor en tanto por ciento, hay que multiplicar el byte recibido por 100 y dividirlo por 255 para obtener el valor, que en la prueba realizada fue de 0 %
42) 0x5A Posición relativa del pedal del acelerador
La solicitud 0x5A también devuelve un único byte de información
>> 7DF: 02 01 5A 00 00 00 00 00
<< 7E8: 03 41 5A 00 00 00 00 00
con el que se representa la posición relativa del pedal acelerador, en una escala de 0 al 100%. Es decir, hay que multiplicar el byte recibido por 100 y dividirlo por 255 para obtener el valor, que en la prueba realizada fue de 0 %.
Según la norma, este PID debe mostrar un valor de 0 % en la posición del pedal sin pisar "aprendida". Por ejemplo, si se utiliza un sensor de 0 a 5,0 voltios (utiliza un voltaje de referencia de 5,0 voltios), y la posición de pedal sin pisar está en 1,0 voltios, este PID deberá mostrar (1,0 - 1,0 / 5,0) = 0,0 % en el la posición de pedal sin pisar y 30,0 % en 2,5 voltios.
Debido a este desplazamiento del pedal sin pisar, cuando se pise el pedal a fondo indicará normalmente mucho menos del 100,0 %, como podemos apreciar en el gráfico realizado durante la prueba.